TouchSDF helps robots understand and reconstruct 3D shapes using their sense of touch, both in simulations and in the real world.
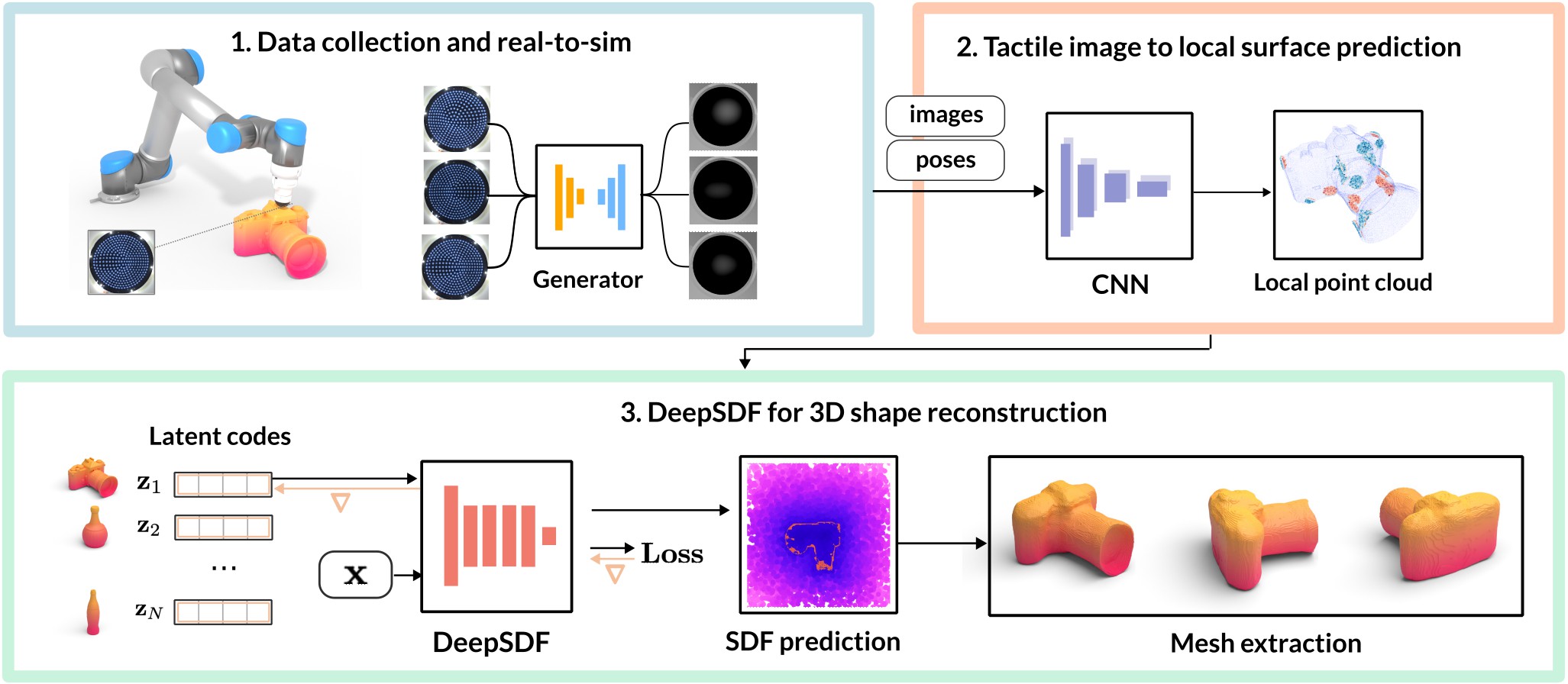
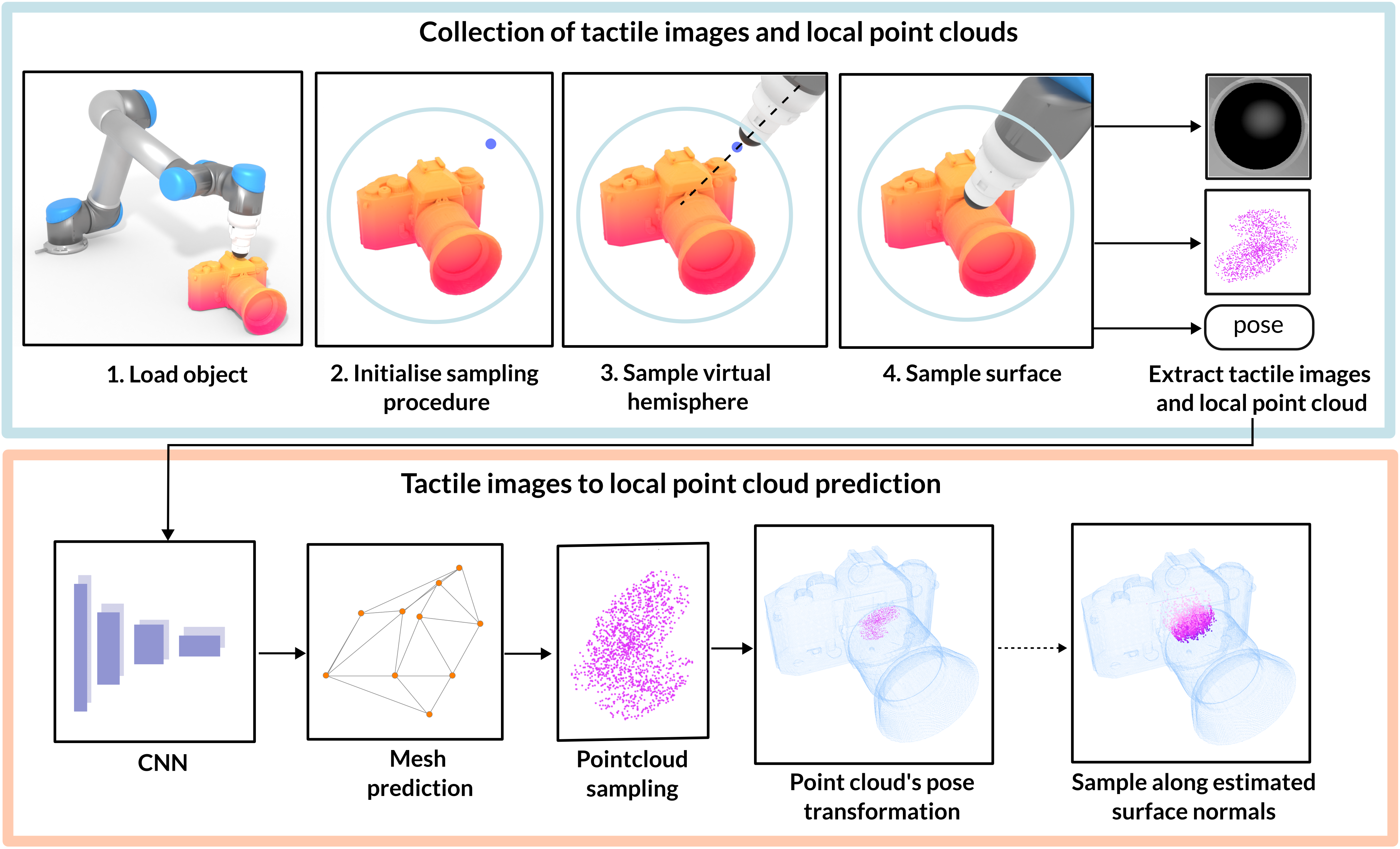
Overview of TouchSDF: (1) A robot samples the object's surface to obtain real tactile images (marker patterns) that are translated into simulated images (depth maps). (2) A Convolutional Neural Network (CNN) maps the simulated images to sets of 3D points representing the local object surface at the touch locations. (3) A pre-trained DeepSDF model predicts a continuous signed-distance function (SDF) representing the object shape from the point clouds over multiple contacts.